Aerolaserskaneerimise kõrguspunktid
Aerolaserskaneerimine (ALS) on meetod, mida kasutatakse õhusõidukilt tehtud LiDAR- mõõdistuste kirjeldamiseks.
Aerolaserskaneerimine põhineb aja mõõtmisel, mis kulub laserimpulsil tee läbimiseks laserist maapinnani ja tagasi. Määrates skaneerimise ajal lennuki positsiooni maapealse GNSS-baasjaama suhtes kogu trajektoori vältel, saadakse lennuki täpne asukoht momendil, mil laserimpulss teele lähetati. Teades täpselt lennuki hetke asukohta (GNSS), asendit (IMU), impulsi lähetusnurka, impulsi kestust ja atmosfääri andmeid on võimalik välja arvutada laserpunkti peegelduse asukoht maapinnal.
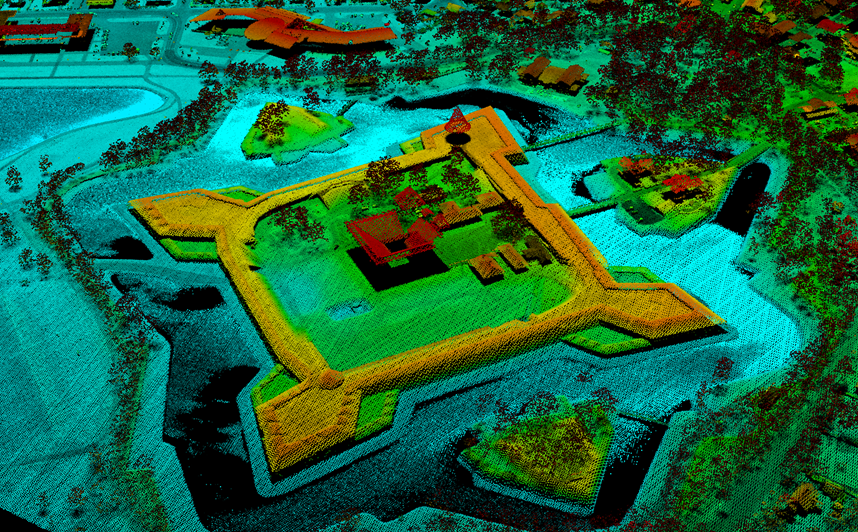
Maapinna peegeldustest moodustatud punktipilv on kõrgusandmestik, mis võimaldab teha topograafilisi, hüdroloogilisi jt analüüse.
Aerolaserskaneerimise mõõdistuslende on teostatud alates 2008. aastast. Tervele Eestile ringi peale tegemiseks kulub 4 aastat (kevadised lennud).
| Andmete põhiomadused | |
|---|---|
| Vorming | LAZ 1.4 |
| Andmestruktuur | punktipilv |
| Keskmine punktitihedus | 18 p/m² — 0,8 p/m² (2016—2018) 2,3 p/m² — 0,14 p/m² (2008—2015) |
| Uuendamise sagedus | aastas kaetakse uute punktidega ca veerand Eesti territooriumist, suuremad asulad igal aastal |
| Kasutamine | punktid on allalaetavad 1:2000 kaardilehtede kaupa |
| Litsents | Maa-ameti avaandmete litsents Andmete kasutamisel palume viidata Maa-ametile. Näiteks: "Kõrgusandmed, Maa-amet 2024" |
ALS andmete iseloomustus
ALS on kaugseire meetod, mille puhul saadakse kõrgusandmed reaalselt kohal käimata. Sellest tulenevalt ei ole tulemused alati vigadevabad. Järgnevalt on kirjeldatud tekkida võivaid vigu.
Diskreetsusest põhjustatud vead
Kasutades matemaatilisi algoritme on võimalik punktipilvest tuvastada eri nähtusi (maapind, taimestik jne). Kui on tegemist tiheda alustaimestikuga alaga, kus tagasipeegeldus ei ole saadud mitte maapinnalt, vaid alustaimestiku pealt, siis võib juhtuda, et alustaimestik lisatakse maapinna osaks.
Taimestikust põhjustatud vigu saab vähendada lennuaja valikuga. See peaks toimuma varakevadel, kui taimestik on tärkamata, või siis sügisel, kui taimestik on juba lamandunud. Praktikas on seda aga ilmastiku tõttu raske saavutada. Sellest lähtuvalt on raiesmikel ja lamandunud taimestiku korral vigade vältimine peaaegu võimatu.
Klassifitseerimise vead
Klassifitseerimisvigadeks saab lugeda klassifitseerimise algoritmidest põhjustatud vigu. Klassifitseerimisalgoritmid sisaldavad alati sisendparameetreid, mille järgi arvutatakse tulemus. Kasutatavad parameetrid on valitud empiiriliselt, mis peaks tagama parima tulemuse kogu ala kohta. Seega on paratamatu, et määratud sisendparameetrite piirväärtuste või neid ületavate väärtuste korral algoritm ei tööta sobivalt.
Näiteks on Eesti maapind valdavalt lauge, kuid samas esineb tihti lokaalseid järske ning suhteliselt suuri kõrguse muutusi. Kasutades parameetreid, mis sobivad laugele maapinnale, jäävad lokaalsed järsakud korrektselt maapinnaks klassifitseerimata. Samas kui kasutada liigendatud maapinna parameetrid, võib saada lauge maapinna hulka haaratud ka ebaühtlane taimestik.
Klassifitseerimisvigu saab reeglina parandada ainult käsitsi, kaasates lisamaterjali või siis kasutada piiratud alal teisi klassifitseerimisparameetreid. Maa-amet teostab ka punktipilvede manuaal-visuaalset korrigeerimist, kus vajadusel muudetakse automaatse tulemuse klassifikatsiooni. Rõhuasetus on selle käigus suunatud ainult maapinda kujutavate punktide õigele klassifikatsioonile.
Kuna andmete kasutaja käsutuses on kõik punktid, siis saab kasutaja ise vajadusel iga punkti klassi muuta või valida välja punktid ainult teda huvitavast klassist.
Absoluutne plaaniline täpsus
Punktipilve plaaniline täpsus on otseses seoses lennukõrgusega. Ehkki laser genereerib koherentset signaali, on impulsi kuju siiski mingil määral koonus. Kui näiteks laserimpulss tabab objekti 3000 m kõrguselt, on selle läbimõõt ~ 80 cm. Seega asub registreeritud asukoht alas, mille läbimõõt on 80 cm. Sellest tulenevalt võib olla registreeritud peegelduse täpsus kuni pool peegeldusjälje läbimõõdust, lisanduvad asukoha määrangust põhjustatud vead.
Plaanilist täpsust Maa-ameti ALS-i andmete puhul mõõdetud ei ole. Küll on kontrollitud andmete sobivust samaaegselt lennatud aerofotodest toodetud ortofotodega (mida on kasutatud ka värvikoodide lisamiseks). Fotodega võrdluse põhjal võib öelda, et suuri asukohavigu andmetes ei esine.
Absoluutne kõrguslik täpsus
Kõrgusliku komponendi viga saab mõõta kontrollpunktidega. Kontrollpunktide valikul tuleb silmas pidada, et peegelduspind ja mõõdetav pind oleks sama. Kontrolliks sobivad kõva kattega taimestikuta pinnad, mida on võimalik maa pealt mõõta.
Kõrguslikud vead tekivad GNSS asukoha määrangust ning punktide asukohast lennuki suhtes. Kõige täpsem tulemus on lennuki nadiiris. Täpsus väheneb lennukist eemaldumisel, sest siis hakkavad mõjuma aina rohkem lennuki asendist ning kauguse mõõtmisest tingitud vead.
Et vigu vähendada, leitakse lennuribade ülekattega aladel omavahelised hälbed ning hälbed tasandatakse minimaalseks. Seejärel kontrollitakse tulemust maa peal mõõdistatud kontrollpunktide suhtes. Saadud hälbed on võimalik tasandada kontrollpunktide suhtes minimaalseks.
Kuna kontrollitav maa-ala on väga suur, siis kasutatakse kontrollmõõdistuseks varianti, kus GNSS-seade on paigaldatud auto katusele, eelnevalt on mõõdetud vastuvõtuantenni kõrgus maapinnast. Kasutades Maa-ameti GNSS-püsijaamade võrku ESTPOS, mõõdistatakse sõitva auto asukoht RTK-GNSS-meetodiga. Salvestamine toimub automaatselt valdavalt iga 10 m järel. Auto kiirus hoitakse võimalikult ühtlane, reeglina 60-70 km/h. Salvestatakse ainult asukoht, mille algtundmatutel oli reaalaja lahend (fikseeritud tulemus) ning mille kvaliteedi standardhälve ei ületanud 7 cm. Hilisemasel tasandamisel kasutatakse kontrollpunkte, mille kvaliteedi standardhälve ei ületanud 3 cm. Kontrollmõõdistus teostatakse eelistatult kõva kattega teedel, kuid nende puudumisel kasutatakse ka kruusateid, harvem pinnasteid.
Andmete kasutamine
Alateemad